Autores
Quina, R.R. (UNIVERSIDADE FEDERAL DE JUIZ DE FORA) ; Costa, R.M. (UNIVERSIDADE FEDERAL DE JUIZ DE FORA) ; Zaidan, R.T. (UNIVERSIDADE FEDERAL DE JUIZ DE FORA)
Resumo
O presente estudo tem como objetivo comparar os resultados encontrados a partir da aplicação do modelo SINMAP sobre dois produtos altimétricos distintos, um proveniente do sensor PALSAR, do satélite ALOS, e o outro originado do sensor LiDAR, ambos foram reamostrados para a mesma resolução espacial, 12,5 metros . O interesse com esse estudo é avaliar se o produto altimétrico existentes no satélite ALOS, apresenta uma resposta satisfatória e aceitável para a aplicação em modelos de predição de escorregamentos. Como respostas, constatou-se que apesar do produto do satélite ALOS não ter a mesma acurácia e detalhamento do sensor LiDAR, é possível observar a existência de semelhança entre eles. Assim considerou-se que os resultados encontrados são aceitáveis e convincentes, e que a metodologia adotada pode sim ser aplicada para a identificação de áreas de risco a escorregamentos em locais onde não tem uma base de dados detalhada.
Palavras chaves
Modelagem; Escorregamentos; MDE's
Introdução
Existem na natureza vários tipos de movimentos de massa, que se diferenciam a partir de condições físicas do local (VARNES, 1984). Os tipos e as classificações intrínsecas a esses processos variam, segundo Selby (1993), conforme o material, modo de deformação, geometria da massa, conteúdo de água, velocidade e mecanismo do movimento. Dentre os diversos tipos de movimentos de massa destacam-se, segundo Michel, Kobiyama e Goerl (2012), os escorregamentos, haja vista que sua intensidade de ocorrência provoca severos danos associados tanto em termos sociais como econômicos (AMARAL; FEIJÓ, 2004). Caracterizam-se como movimentos rápidos de massas de solos, rochas, ou por uma complexa mistura de solo e rocha, muitas vezes com depósitos de lixo doméstico (AUGUSTO FILHO, 1992). Apresentando curta duração com limites (superfícies de ruptura) bem definidos em termos de profundidade e largura, permitindo a distinção entre o material deslizado e aquele não movimentado (GUIDICINI; NIEBLE, 1984; FERNANDES; AMARAL, 1996). Uma maneira de identificação de áreas propensas à ocorrência desse tipo de processo, para posterior mitigação e tomada de decisão, encontra-se relacionada, sobretudo a partir da década de 1980, com a introdução de computadores, à utilização das geotecnologias (Sistemas de Informações Geográficas, Geoprocessamento, Sensoriamento Remoto, Aerofotogrametria) em consonância com uso de modelos matemáticos e estatísticos, consolidados sobre bases físicas, tendo como elementos estruturadores modelos hidrológicos e de estabilidade de encostas (FERNANDES et al., 2001). Como exemplo de modelos matemáticos preditivos que utilizam bases físicas na determinação de áreas que possuem probabilidade a ocorrência de escorregamentos destacam-se o TRIGRS (Transient Rainfall Infiltration and Grid-based Regional Slope-Stability Model) (BAUM et al., 2002), SHALSTAB (Shallow Landslide Stability Analysis) (MONTGOMERY; DIETRICH, 1994), SINMAP (Stability INdex MAPping) (PACK; TARBOTON; GOODWIN, 1998), entre outros. O uso da modelagem enquanto ferramenta científica na geografia física, segundo Fernandes (2016), apresenta-se como uma alternativa as limitações impostas pelas escalas espaciais e/ou temporais utilizadas, aos custos envolvidos e aos problemas de acesso a uma determinada área. Fato este que faz com que os modelos possam ser usados como instrumentos de apoio ao planejamento e ao preenchimento das lacunas existentes em termos de predição de um dado comportamento, uma transformação ou uma evolução. Nesse sentido, o estudo se justifica em virtude da carência de dados topográficos com alta resolução para a maioria dos municípios brasileiros, inclusive para a realização de trabalhos que visam identificar áreas propensas a escorregamento, por exemplo. Daí o interesse em avaliar produtos gratuitos, pois exista viabilidade, podem vir a suprir de maneira suficiente e aceitável a inexistência de levantamentos topográficos com detalhes para grande parte dos municípios brasileiros. Assim, o objetivo deste trabalho é comparar os resultados oriundos da aplicação do modelo SINMAP, a partir da utilização de dois Modelos Digitais de Elevação (MDE) diferentes, um proveniente do sensor LiDAR e outro do sensor PALSAR (satélite ALOS), ambos com a mesma resolução espacial de 12,5 metros. O interesse então foi de avaliar se o produto altimétrico do satélite ALOS, sensor PALSAR, apresenta uma resposta satisfatória e aceitável para a identificação de estabilidade de encostas. Com isso se fez necessário escolher um local onde fosse possível comparar os dois produtos, sendo a Bacia Hidrográfica do Córrego Tapera (BHCT) a área selecionada para tal, uma vez que presente no espaço urbano de Juiz de Fora, apresenta tanto curvas de nível detalhadas proveniente do Levantamento Aerofotogramétrico LiDAR, quanto cenas do sensor PALSAR.
Material e métodos
O satélite ALOS é composto por 3 sensores: o PRISM (Panchromatic Remote- sensing Instrument for Stereo Mapping), o AVNIR-2 (Advanced Visible and Near-Infrared Radiometer – Type 2) e o PALSAR (Phased Array L-band Synthetic Aperture Radar), utilizado no presente estudo. O sensor PRISM, obtém imagens tridimensionais detalhadas da superfície terrestre, o AVNIR-2 possibilita a aquisição de imagens voltadas para o mapeamento de uso e cobertura da terra, e o sensor PALSAR proporciona a obtenção de imagens altimétricas diurnas e noturnas sem a interferência de nebulosidade (IBGE, 2008). Escolheu-se as imagens do sensor PALSAR, pois trata-se de um produto livre e gratuito, que com uma resolução espacial de 12,5 metros, é a melhor resolução existente quando comparado com os demais satélites livres disponíveis para download. Barros et al. (2009) destacam que essas imagens podem ser de grande valia para a geração de produtos cartográficos, para áreas onde existem poucas informações espaciais com detalhes. Já no que se refere ao LiDAR (Light Detection and Ranging), cabe ressaltar que esse se baseia na determinação da distância entre o sensor e a superfície através de um pulso que se propaga à velocidade da luz (WUTKE; CENTENO, 2007). Suas medições são obtidas pelo tempo de emissão do pulso laser até o alvo e o tempo de retorno do mesmo até o sistema (MACIEL, 2011). Técnica esta que foi utilizada pela empresa ESTEIO S/A, no ano de 2007, para a realização do Levantamento Topográfico do município de Juiz de Fora-MG. Ambos os MDE’s presentes nos produtos ALOS E LiDAR foram utilizados para alimentação e aplicação do modelo SINMAP. MODELO SINMAP Segundo informações contidas no site (http://hydrology.usu.edu/sinmap/), o modelo SINMAP (Stability Index Mapping), desenvolvido por Pack; Tarboton e Goodwin (1998) se caracteriza como um modelo estocástico para mapeamento de índices de estabilidade em encostas, o qual se fundamenta no conceito de modelo hidrológico de estado uniforme (steady-state) e no modelo de vertente infinita. Sua classificação de probabilidade à ocorrência de escorregamentos se baseia na variação espacial da declividade e do índice geomorfológico, associados a parâmetros climáticos e pedológicos (PACK et al., 2005). O referido modelo, concebido através do módulo 2.0, possui interface direta com o software ArcGis, ambiente onde realizou-se a programação do mesmo (PECHINCHA; ZAIDAN, 2016). O resultado e a espacialização do Índice de Estabilidade (SI) são previstos para cada célula (pixel) presente nos dados matriciais. O SI é definido como a probabilidade de uma região ser considerada estável ou não, tal índice é assumido mediante a distribuição uniforme dos parâmetros sobre os intervalos de certeza definidos. Na maioria dos casos os valores do índice de estabilidade variam de 0 a 1, onde 0 é considerado muito instável e 1 menos instável (MICHEL, 2011; MICHEL; KOBIYAMA e GOERL, 2012). Na Figura 1, segue os parâmetros utilizados para o cálculo do SI necessários para a alimentação e calibração do modelo. PROCEDIMENTOS ADOTADOS A priori, fez-se necessário a interpolação das curvas de nível com equidistância de 1m do LiDAR, usando a ferramenta topo to raster presente no software ArcGis, adotando a resolução espacial de saída de 12,5 metros. Observa-se que a escolha da resolução de saída se deu para que os dois MDEs ficassem com a mesma resolução para haver base de comparação. A posteriori, realizou-se o georreferenciamento do MDE proveniente do satélite ALOS, sensor PALSAR, adquirido do sitio eletrônico (https://vertex.daac.asf.alaska. edu/). Para realizar tal procedimento utilizou-se a rede de drenagem e o limite da BHCT, buscando assim estabelecer uma equidade entre os MDE’s no que se refere à área estudada. Após esses procedimentos, extraiu-se o mesmo número de colunas e linhas. Tal técnica foi aplicada no intuito de se estabelecer uma semelhança na quantidade de pixel entre os rasters, para a alimentação do modelo.
Resultado e discussão
Inicialmente serão apresentados dois mapas referentes às áreas de saturação
do solo e as classes de declividade (Figura 2), criados pelo modelo para a
bacia hidrográfica estudada. O primeiro mapa busca representar a relação
existente entre a água que adentra ao sistema sob forma de recarga
(precipitação) e a água que deixa tal sistema por meio da camada saturada do
solo. Já o segundo, referente às classes de declividade, representa a
inclinação da superfície da área estudada, sendo essas expressas em
porcentagem (%).
A discussão de tais mapas torna-se pertinente, pois as áreas de saturação
estão diretamente relacionadas aos modelos hidrológicos de estado uniforme
(steady state). Neste, a recarga de um dado solo, se dá pela variação
espacial da umidade presente (altura da coluna d’água) durante o período
chuvoso. A capacidade de saturação de um dado solo está relacionada à sua
porosidade, taxa de percolação e profundidade, as quais dependem da
declividade, comprimento da encosta e áreas de contribuição de fluxo da água
(MICHEL, 2011, p.32).
Assim, áreas com menores índices de saturação (áreas em azul claro), na
maioria das vezes correspondem às encostas convexas e locais de alta
declividade, já áreas com maiores saturações coincidem com encostas côncavas
e áreas mais planas (áreas em azul escuro).
Ao comparar os índices de saturação resultantes do modelo SINMAP é possível
destacar que o produto do sensor PALSAR (satélite ALOS), Figura 2B,
apresenta uma área relativa aos altos índices de saturação (regiões planas),
maior do que a área presente no produto do sensor LiDAR (FIGURA 2A). Para o
fator saturação, observou-se que o sensor PALSAR se comportou como sendo
mais generalista na definição das classes do que o sensor LiDAR, muito pelo
fato, deste segundo ser proveniente de um produto de maior detalhamento.
Já a declividade, é considerada um dos principais fatores em estudos que
visam à identificação de áreas de risco (MICHEL, 2011; DA SILVA; DA SILVEIRA
e FIORI, 2012). No Brasil, por exemplo, existem leis relativas ao uso e
parcelamento do solo em áreas urbanas, que mediante suas normatizações,
adotam a declividade como um parâmetro inibidor à ocupação e uso da terra. A
Lei nº. 6.766/79, em seu primeiro capítulo, além de outras regulamentações,
deixando claro que não pode ser permitido o parcelamento do solo urbano:
“III - em terreno com declividade igual ou superior a 30% (trinta por
cento), salvo se atendidas exigências específicas das autoridades
competentes;”
Tomando como base a declividade, observa-se que as áreas consideradas
impróprias à ocupação humana, segundo a legislação, apresentam-se bem
definidas, estabelecidas e espacializadas sobre o relevo encontrado na área.
Se fizer uma delimitação das áreas mais críticas relativa ao parcelamento do
solo, acima de 30% de declividade, como corrobora a legislação, é aceitável
dizer que o resultado proveniente do satélite ALOS (FIGURA 2B) apresenta
forte semelhança com as mesmas classes presentes no LiDAR (FIGURA 2A).
Destaca-se que mesmo o ALOS não tendo o nível de detalhe e continuidade que
as classes presentes no LiDAR, verifica-se que seu produto muito se
assemelha ao do Levantamento Aerofotogramétrico feito pela PJF. Tal
constatação se dá mediante a observação da disposição das classes presentes
em ambos os mapas, tomando como pontos de referências os topos de morros, as
linhas de drenagens e as encostas.
Observa-se a presença de baixos valores de declividade tanto nas áreas de
planície, quanto em topos de morros planos em ambos os produtos. Outra área
a qual se destaca uma similaridade entre o LiDAR e o ALOS, são as vertentes
presentes na bacia estudada, onde nessas é possível destacar as maiores
classes de declividade (acima de 30%).
Na sequência será apresentado o resultado gerado pelo modelo SINMAP
referente à distribuição probabilística de áreas instáveis geradas pela
combinação dos fatores topográfico, geomorfológico, pedológico e climático.
O resultado encontra-se espacializado na Figura 3, com a especificação das 6
classes de estabilidade propostas pelo modelo.
Observa-se que em ambos os produtos expostos existe uma similaridade
expressiva na ocorrência e distribuição das classes de estabilidade
presentes tanto no LiDAR, quanto no ALOS. Destaca-se que as áreas
consideradas instáveis apresentam uma conexão direta com os locais de maior
declividade, já as áreas consideradas estáveis apresenta uma relação direta
com as classes de menores declividades, essas expostas no segundo mapa da
Figura 2.
A conformidade entre as classes de estabilidades presentes na comparação do
mapa acima, é considerada bem semelhante principalmente nas áreas
consideradas mais instáveis, com destaque para áreas côncavas e onde o mapa
de declividade apontou para inclinações acima dos 30%.
Observa-se uma similaridade notável na distribuição das classes de
estabilidades de encostas ao longo da bacia estudada. Visualmente nota-se
que ambos os produtos altimétricos ao serem aplicados em um ambiente que
contém a mesma conformação geográfica, apresentam uma resposta convincente
no ordenamento e localização das classes de estabilidade oferecidas pelo
modelo utilizado para esse estudo.
Com intuito de quantificar e mensurar os resultados representados por meio
dos mapas, confeccionou-se então uma tabela com a distribuição quantitativa
dos pixels existentes para cada uma das classes de declividades, e também
para cada uma das classes de estabilidade geradas pelo modelo SINMAP,
mediante aos MDE’s provenientes do sensor LiDAR e PALSAR (FIGURA 4). Na
referida tabela encontram-se paralelamente estabelecidos à quantidade de
pixels presentes em ambos os produtos estudados.
A primeira vista, pode-se inferir que mediante a comparação entre o número
de pixels existente em cada produto analisado, a maior quantidade encontra-
se definida pelas classes de declividade acima de 30%, seguida da classe de
15-30%. Referente a classes de estabilidade se destacam as áreas
consideradas “instáveis” e “moderadamente instáveis”, seguidas pelas “áreas
estáveis”, como sendo as maiores concentrações de pixels em ambos os
produtos analisados.
Ao analisar a tabela como um todo, sem dar ênfase às classes com maior
quantidade de pixels, nota-se que existiu um comportamento aproximado do
somatório de células existentes para todas as classes de ambos os produtos
estudos.
No que se refere à classe considerada mais tênue para a ocorrência de
escorregamentos, acima de 30% de declividade, como apontado pela legislação,
a diferença não passou dos 400 pixels, em um total aproximado de 18 mil,
fato esse que desse ser levado em consideração. Outro quantitativo que deve
ser apresentado está no somatório de pixels das áreas consideradas
instáveis, onde somente 204 pixels foi a diferença encontrada no produto
gerado pelo LiDAR do produto gerado pelo sensor PALSAR, em um total de
aproximadamente 10 mil células.
Já as maiores diferenças encontradas estão na classe de declividade de 6-15%
e na classe de estabilidade “moderadamente instáveis”, com aproximadamente
700 pixels de diferença nos dois.
Com tal constatação nos leva a crer que o produto do satélite ALOS, quando
relacionados com as outras variáveis de entradas necessárias para o
desenvolvimento do modelo, apresentou resultados convincentes quando
comparado quantitativamente aos resultados apresentados pelo sensor LiDAR.
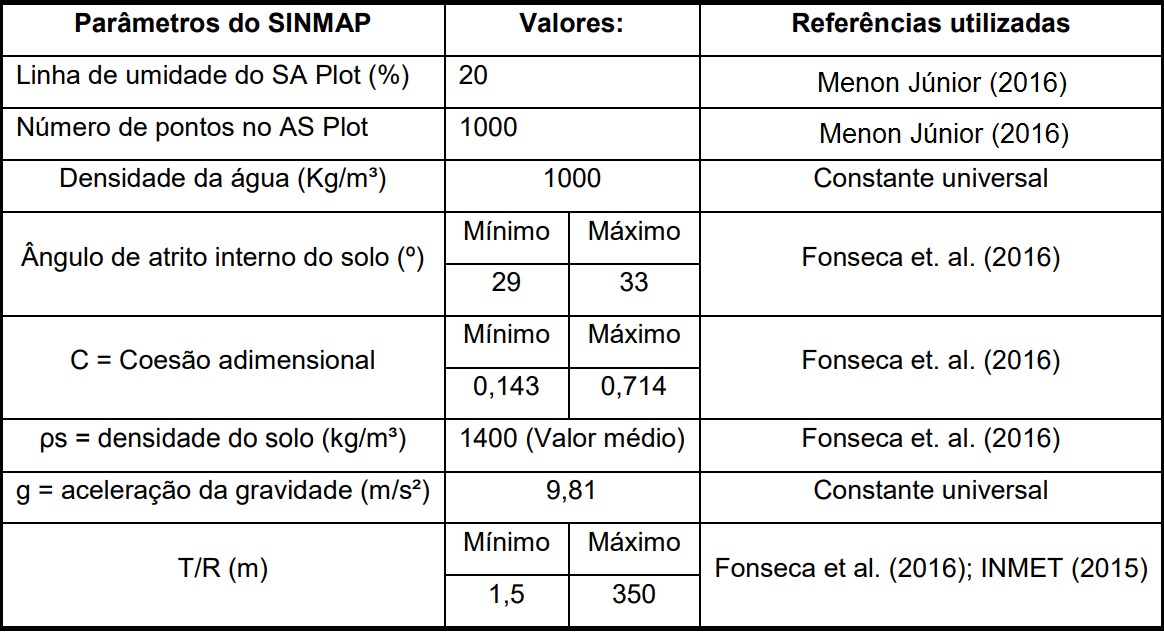
Parâmetros de entrada para simulação do SINMAP. Fonte: adaptado de Menon Junior (2016).
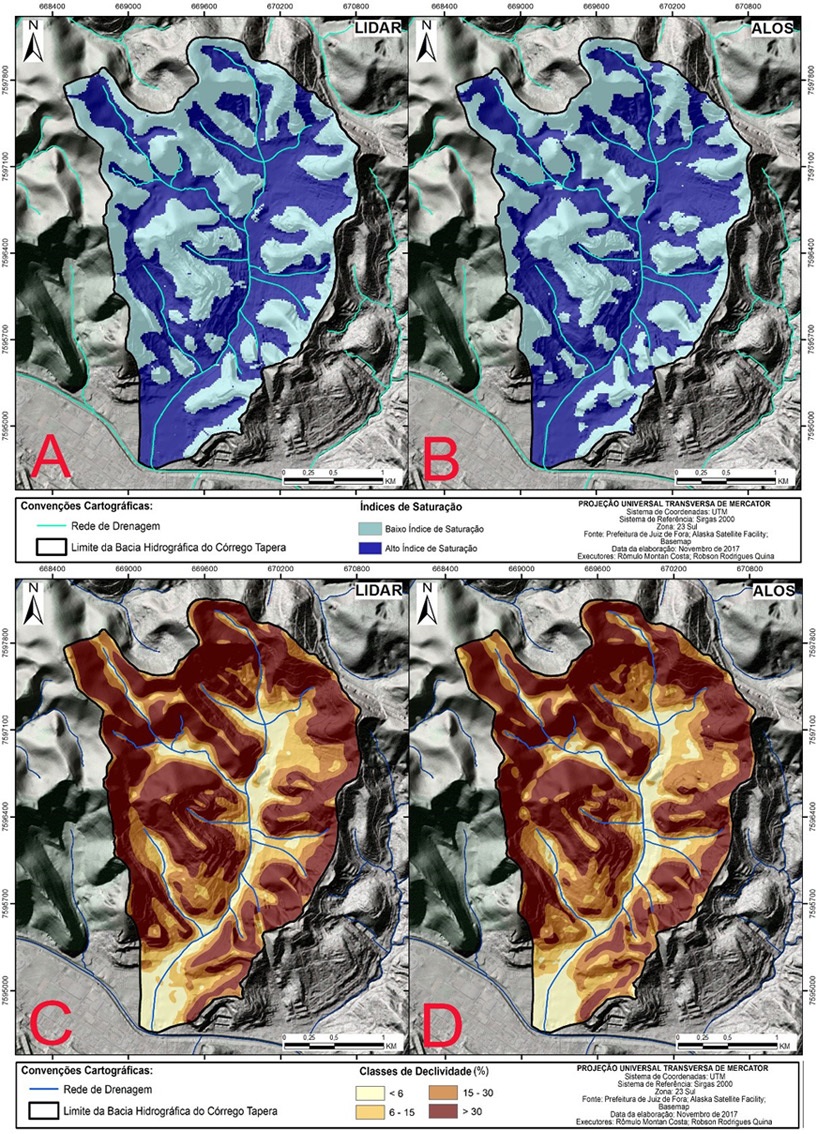
Seguindo a ordem de cima para baixo: Mapa de Saturação de Solo e Declividade na Bacia Hidrográfica do Córrego Tapera.
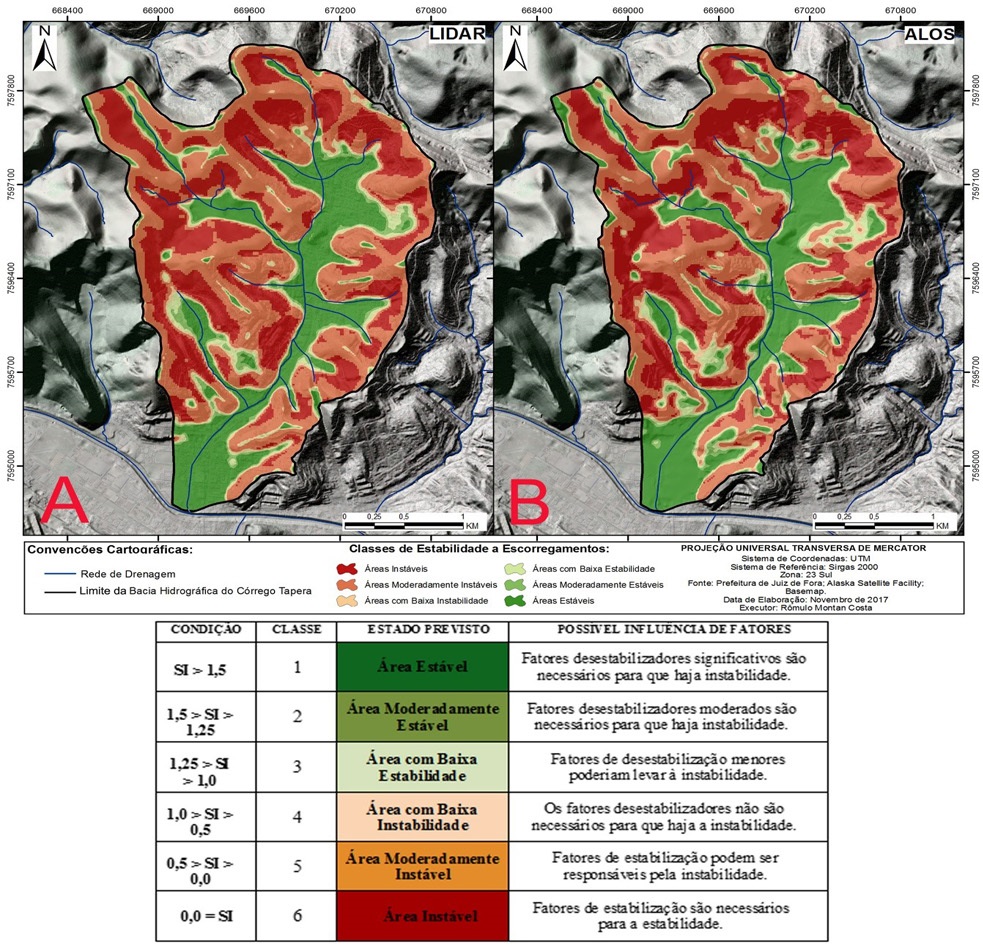
Mapa de Estabilidade de Encosta na BHCT, e definição das classes de estabilidade. Fonte: Costa, 2016 (Adaptado de PACK, TARBOTON e GODWIN, 1998).
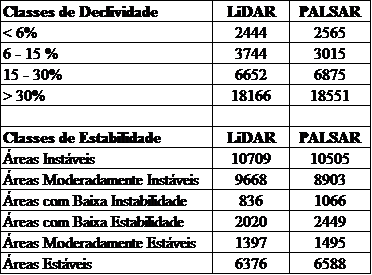
Tabela com a quantidade de pixels referente a cada uma das classes presentes nos mapas de declividade e de estabilidade de encosta.
Considerações Finais
Nos resultados encontrados a partir da comparação entre os produtos do satélite ALOS e do sensor LiDAR, é possível afirmar que o segundo apresentam um maior detalhamento quando comparado ao primeiro. Tal fato ficou evidente em todos os produtos gerados pelo modelo SINMAP. Tal resposta já era esperada, porém, os produtos elaborados do satélite ALOS, apesar de não ter a mesma acurácia que o LiDAR, apresentou uma boa resposta e semelhança entre seus resultados, com uma espacialização análoga entre as classes dos mapas de Saturação, Declividade e de Estabilidade de Encosta. No mapa de Estabilidade, a semelhança entre os produtos foi a mais evidente dentre os outros. Todas as áreas identificadas no sensor LiDAR, encontram-se presentes no resultado do sensor PALSAR, com diferenças observada apenas na junção de algumas classes por parte do sensor PALSAR, devido ao seu menor detalhamento. No geral observa-se que existem diferenças pontuais entre os resultados encontrados na comparação entre o satélite ALOS e o sensor LiDAR, as quais ainda precisam passar por uma validação estatística, porém, acredita-se que essas não invalidam a utilização do produto altimétrico do satélite ALOS. Contudo, conclui-se que os resultados encontrados são satisfatórios e aceitáveis, e que tal metodologia pode ser aplicada para a identificação de áreas de risco a escorregamentos em locais onde não tem uma base de dados detalhada, sem que os resultados sejam considerados inválidos e/ou ilegítimos.
Agradecimentos
Agradecer ao Programa de Pós-Graduação em Geografia da Universidade Federal de Juiz de Fora (UFJF) pelo auxílio financeiro, a CAPES pela concessão da bolsa de Mestrado e ao Laboratório de Geoprocessamento Aplicado (LGA) da UFJF pela disponibilização dos dados e infraestrutura para o desenvolvimento e construção deste trabalho.
Referências
AMARAL, C.; FEIJÓ, R. L. Aspectos Ambientais dos Escorregamentos em Áreas Urbanas. In: VITTE, A. C. e GUERRA, A. J. T. (Ed.). Reflexões sobre a Geografia Física no Brasil. Rio de Janeiro: Bertrand Brasil, 2004. p.193-224.
AUGUSTO FILHO, O. Caracterização geológica-geoténica voltada à estabilização de encostas: uma proposta metodológica. In: conferência brasileira sobre estabilidade de encostas, 1, 1992, Rio de Janeiro. Anais. Rio de Janeiro: ABMS/ ABGE/ PCRJ. v.2, pp.721-33, 1992.
BARROS, R. S.; COELHO, A. L.; OLIVEIRA, L. F.; MELO, M. F.; CORREIA, J. D. Avaliação Geométrica de Imagens ALOS/PRISM Níveis 1B2G e 1B2R Ortorretificada – estudo de caso: Itaguaí, RJ. In: XIV Simpósio Brasileiro de Sensoriamento Remoto (SBSR) 14..2009, Natal. Anais...São José dos Campos: INPE, 2009. Artigos, p. 1243-1250. CD-ROM, On-line. ISBN 978-85-17-00044-7. Disponível em: http://marte.dpi.inpe.br/col/dpi.inpe.br/sbsr@80/2008/11.17.19.47/doc/173-1738.pdf Acesso em: 13 set. 2017.
BRASIL. Presidência da República. Parcelamento do Solo Urbano. Lei 6766/79. Brasília, DF: Série Documentos Sociais, 1980.
COSTA, R. M. Avaliação de Probabilidade e Risco à Ocorrencia de Escorregamentos na Bacia Hidrográfica do Córrego Tapera, Juiz de Fora-MG. Trabalho de Conclusão de Curso (monografia). Universidade Federal de Juiz de Fora, Instituto de Ciências Humanas, 2016.180p.
DA SILVA, J. P.; DA SILVEIRA, C. T.; FIORI, A. P. Aplicação de dois métodos físico-matemáticos para avaliação do índice de estabilidade das vertentes da Bacia do Rio Ribeirão/Paranaguá-PR. Revista Geonorte, v. 3, n. 5, p. 1291-1302, 2012.
FERNANDES, B. J. Diagnóstico ambiental com ênfase na ocorrência de escorregamentos na Bacia Hidrográfica do Côrrego Tapera, Juiz de Fora-MG. Dissertação (mestrado acadêmico) – Universidade Federal de Juiz de Fora, Instituto de Ciências Humanas. Pós-Graduação em Geografia, 2016. 133f.
FERNANDES, N. F. Modelagem em Geografia Física: Teoria, Potencialidades e Desafios. Espaço Aberto, PPGG - UFRJ, V. 6, N.1, p. 209-247, 2016
FERNANDES, N. F.; AMARAL, C. P. Movimentos de Massa: Uma Abordagem GeológicoGeomorfológica. In A. J. T. Guerra E S. B. Cunha (Eds.) Geomorfologia e Meio Ambiente, Bertrand, Rio de Janeiro, pp. 123-194. 1996.
FERNANDES, N. F.; GUIMARAES, R. F.; GOMES, R. A. T.; VIEIRA, B.C.; MONTGOMERY, D. R.; GREENBERG, H. Condicionantes Geomorfológicos dos Deslizamentos nas Encostas: Teoria, Evidências de Campo e Aplicação de Modelo de Previsão de Áreas Susceptíveis. Rev. Bras. de Geomorfologia, v. 2, no. 1, p. 51-71, 2001.
GUIDICINI, G. E NIEBLE, C. M. Estabilidade de Taludes Naturais e de Escavação. Ed. Edgard Blücher, São Paulo, 194 p. 1984.
INSTITUTO BRASILEIRO DE GEOGRAFIA E ESTATÍSTICA (IBGE). 2006. IBGE como Sub-nó de distribuição de Imagens do Satélite.
INSTITUTO BRASILEIRO DE GEOGRAFIA E ESTATÍSTICA (IBGE). 2008. ALOS características e aplicações.
LISTO, F. L. R.. Modelos matemáticos aplicados à previsão de escorregamentos translacionais rasos: exemplos em áreas naturais e de risco. CLIO Série Arqueológica (UFPE), v. 31, p. 91, 2016.
MACIEL, Ariana de Oliveira - Aplicações: Mapeamento móvel utilizando tecnologia LIDAR. Disponível em: <http://www.dsr.inpe.br/sbsr2011/files/p0946.pdf
MICHEL, G. P. Estudo de Escorregamentos na Bacia do Rio da Cunha, Rio dos Cedros/SC, com modelos SHALSTAB E SINMAP. 2011. 84 f. TCC (Graduação) - Curso de Engenharia Sanitária e Ambiental, Centro Tecnológico, Universidade Federal de Santa Catarina-UFSC, Florianópolis, 2011.
MICHEL, G. P.; KOBIYAMA, M.; GOERL, R. F. Análise comparativa entre os modelos Shalstab e Sinmap na identificação de áreas susceptíveis a escorregamentos translacionais. Anais. Encontro Nacional de Engenharia de Sedimentos: artigos selecionados. Porto Alegre: ABRH, 2012. Disponível em: <http://www.labhidro.ufsc.br/Artigos/ENES161.pdf>. Acessado em: 06/11/2017.
MONTGOMERY, D. R. E DIETRICH, W. E. A physically based model for the topographic control on shallow landsliding. Water Resources Research, v.30, n.4, 1994. p. 1153-1171.
PACK, R. T.; TARBOTON, D. G.; GOODWIN, C. N. Terrain Stability Mapping with SINMAP, technical description and users guide for version 1.00. Report Number 4114-0, Terratech Consulting Ltd., Salmon Arm, B.C. Canada (www.tclbc.com), 1998.
PACK, R. T; TARBOTON D. G; GOODWIN C. N; PRASAD, A. A stability index approach to terrain stability hazard mapping, “SINMAP user’s manual”, 2005.
PECHINCHA, M. G. H.; ZAIDAN, R. T. Risco a ocorrência de movimentos de massa e seu potencial na análise da qualidade ambiental. Revista de Geografia-PPGEO-UFJF, v. 2, n. 2, 2016.
PREFEITURA DE JUIZ DE FORA (PJF). Plano diretor de Desenvolvimento Urbano. 1ª Edição. Juiz de Fora: Concorde, 2004. 580p.
SELBY, M. J. Hillslope Materials and Processes. 2ªed. New York: Oxford University Press, 1993. 451 p.
VARNES, D. J. Landslide hazard zonation: a review of principles and practice. United Nations Educational. Scientific and Cultural Organization. Paris, 1984. Disponível em: http://unesdoc.unesco.org/images/0006/000630/063038EB.pdf. Acessado em 25 de Nov. de 2017.
WUTKE, J. D.; CENTENO, J. A. S. Métodos para avaliação da resolução de sistemas de varredura a LASER. Boletim de Ciências Geodésicas, v. 13, p. 151-164, 2007.